全国
首页
我的猪八戒
服务商中心
登录
注册
猪八戒网
所有案例
工业设计与制造案例
产品结构设计案例
机械设计案例
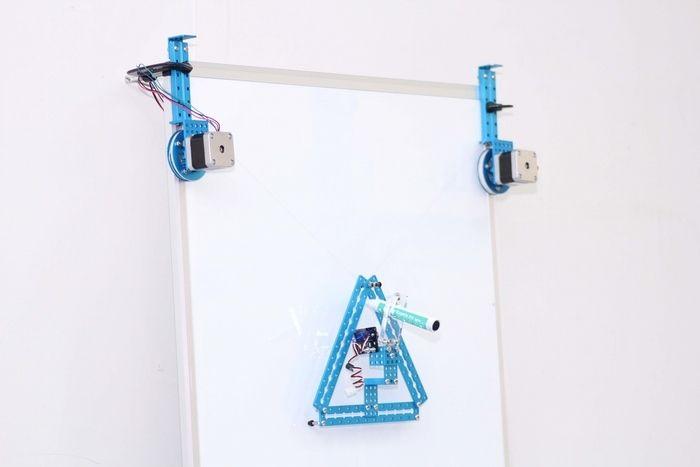
四合一绘图机器人
机械设计
1970年01月-1970年01月
¥40000.00
案例介绍
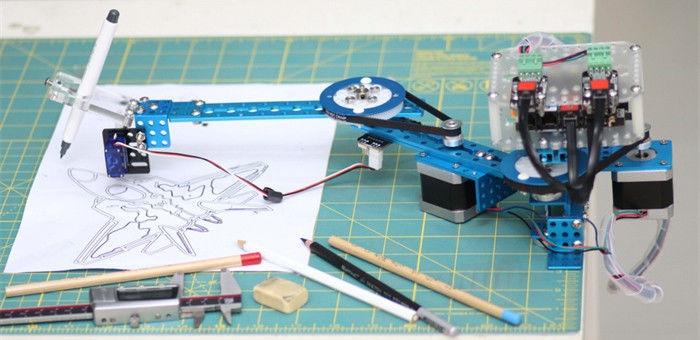
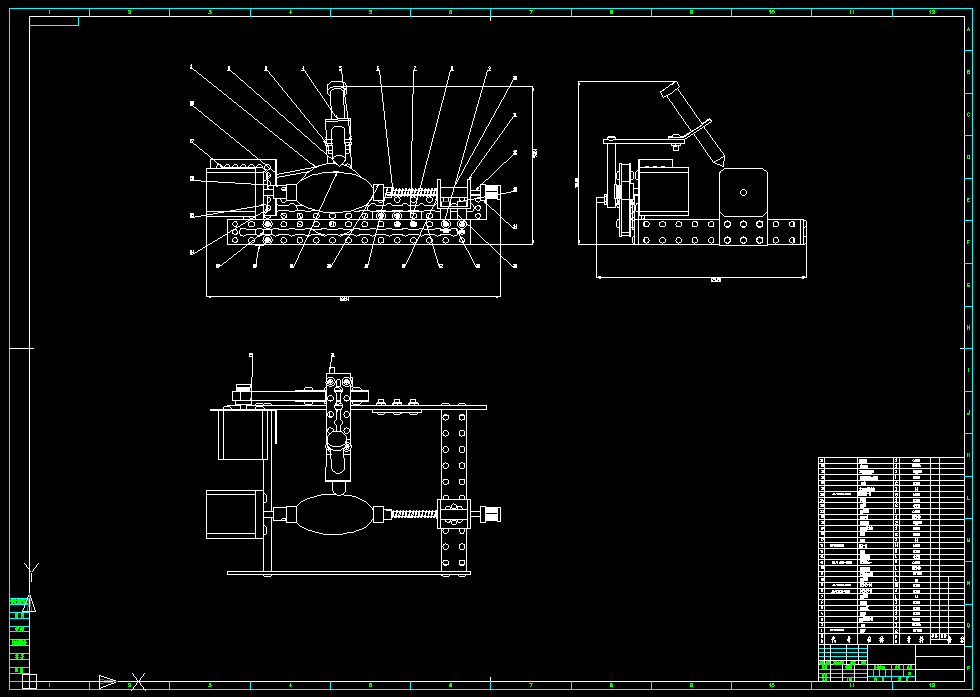
本设计内容为四自由度关节型机器人,主要对关节型机器人的操作臂进行系统的设计,机器人的末端操作器即手指是可替换夹具,操作臂有四个自由度,可实现在工作空间范围内的物体的转移,手爪一次可载荷0.5kg。 操作臂的动力源为舵机,总共有5个舵机,它们分别控制腰部旋转,大臂、小臂、手腕的摆动,以及手爪张合,本文设计的四自由度关节型机器人可用于小工作空间内完成对小质量物体的转移工作,同时也可以做为教学机器人。
非标设计
机械设计
四合一机器人
内容声明 :猪八戒网为第三方交易平台及互联网信息服务提供者,猪八戒网(含网站、客户端等)所展示的商品/服务的标题、价格、详情等信息内容系由店铺经营者发布,其真实性、准确性和合法性均由店铺经营者负责。猪八戒网提醒用户购买商品/服务前注意谨慎核实。如用户对商品/服务的标题、价格、详情等任何信息有任何疑问的,请在购买前与店铺经营者沟通确认;猪八戒存在海量店铺,如用户发现店铺内有任何违法/侵权信息,请立即向猪八戒网举报并提供有效线索。
万峰设计
0
近半年成交
100
%
好评率
100
%
项目完成率
立即咨询
服务保障
万峰设计
服务质量评分
0.0分
棒
在线咨询
新人
加入创业联盟群
和老板一起搞钱
反馈
客服
✕
使用猪八戒小程序
随时随地享服务
关注猪八戒公众号
订单进度随时查
顶部
免费领取百万补贴福利
近期浏览
免费咨询专家
我的收藏
全部